
PERCブログBlog
火星衛星探査計画(MMX)搭載レーザ高度計(LIDAR)の実測距試験
火星衛星探査計画(MMX)搭載レーザ高度計(LIDAR)は,自身で発した光がターゲット表面で散乱されて帰ってくるまでの時間を正確に計測し,距離を求める装置です。測距できる範囲は 100m から 100km 以上と3桁にわたります(エネルギーでいうと100万倍の幅がある)。この装置を使うと,例えば 80km 先にターゲットがある場合と,80.002km 先にターゲットがある場合はちゃんと区別ができて,後者の方が2m くらい遠くにあることがわかります。現実には計測の誤差が付きますが,せいぜい 1m 程度です。ところが,1回の測定で距離を求めても, 80km なのか80.002km なのかはなかなか断言できません。なぜこのようなことが起きるのでしょうか。
LIDAR は上に書いたように,精密に時間を測る装置です。ところが,コマンドを受け取ってから光を出す,光が出たことを処理系に伝える,帰ってきた光を検知する,検知したことを処理系に伝える,など,それぞれの処理や通信には有限の時間がかかります。人間の感覚からすると一瞬ですが,10億分の1秒以下の精度で時間を測る装置からすると,大きな誤差要因となります(因みに「一瞬」の語源となっている瞬(まばたき)は 0.1-0.3秒くらいだそうです。長い。)
幸いなことに,装置内部の処理に起因する遅れ(内部遅延)は,信号を受け取るタイミングにはあまり依存しません。このため「固定遅延」とも呼ばれます。固定遅延は,正確に距離が分かっているターゲットを利用して,装置で求めた距離と実際の距離の差として求めます。この時,ターゲットまでの距離は何10km も離れている必要はありません。固定遅延は内部処理で決まっているため,返ってくる光のタイミングには依存しないためです。とはいえ,あまりにターゲットが近いと内部の処理が追いつきません。現実的な範囲で,なるべく長い距離を取った試験を行います。
固定遅延には装置の「個性」が出ます。このため試験は,実際に探査機に搭載して打ち上げる本番品(フライトモデルと呼びます)で行います。しかしフライトモデルは温度・湿度・清浄度などの環境がコントロールされたクリーンルームの中で取り扱わなければなりません。そこで我々は,宇宙科学研究所で衛星の組み立てにも使われる大きなクリーンルームで実距離の試験を行いました。大きな部屋の対角線を使って,なんとか25mの距離を確保しました。
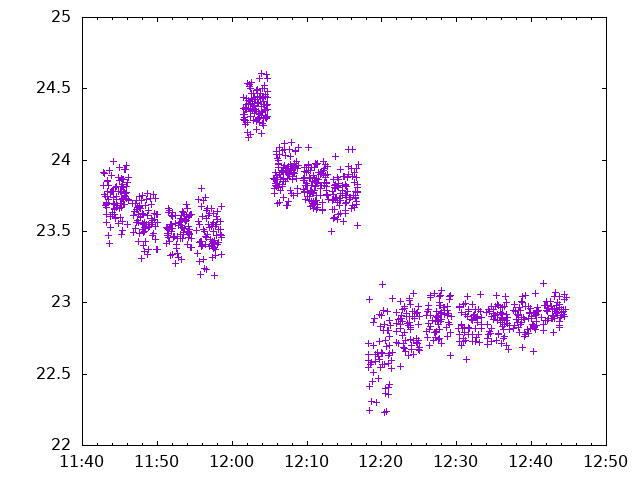
図は,実際に取得されたデータです。これを見ると,装置が出力する距離は 25m よりも少し短くなっています。これは信号に先んじて内部処理が行われているという事ではなく,信号の立ち上がり・立ち下がりからタイミングを外挿するなどの処理を行った結果です。また,いくつか異なる距離値が出ています。これは装置の内部パラメタや光の強さを変更したことに起因します。
このような地道な実験を積み上げることで,実際に宇宙から下りてきた計測結果を,より精密なデータに置き換えることができるようになります。
===
この記事は MMX レーザ高度計(LIDAR)開発中に準備されたものです。
LIDAR はすでに開発完了し,MMX プロジェクトに引き渡されています。