
PERCブログBlog
気球を使った空中発射ロケット発射成功
こんにちは。空中発射ロケット担当の庄山です。
ロケットを気球(バルーン)から発射する方式をロックーンと呼びます。通常は地面に置いた発射台(ランチャ)を用いますが、気球で高いところまで吊り上げたランチャからロケットを空中発射するメリットについては、前回のブログで説明しました。
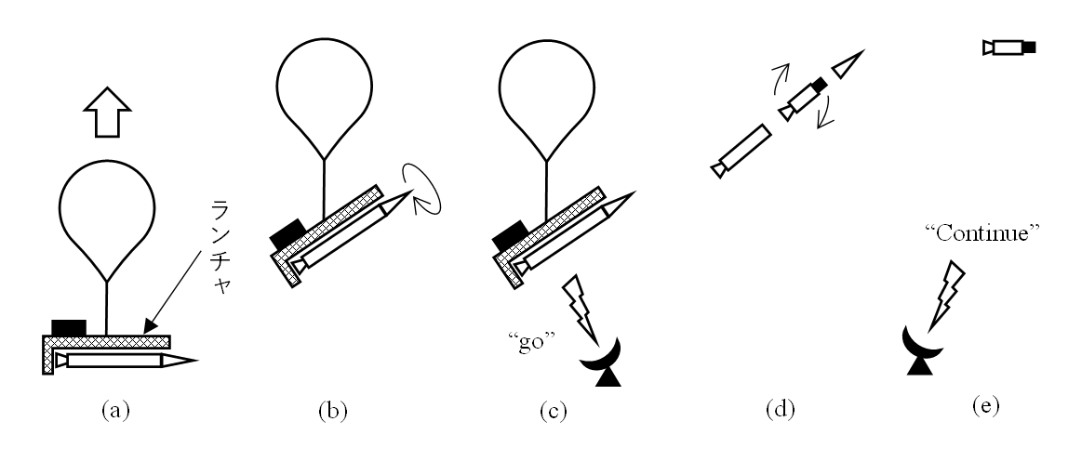
ロックーン方式
世界初の方位角制御ロックーン!
ロックーンの歴史は長く、ヴァン・アレン帯で有名なアメリカの物理学者ヴァン・アレン(Van Allen)によって1950年代に科学観測を目的に行われています。それ以来、ロックーンを用いた発射実験が複数回行われましたが、いずれも方位角制御が為されていませんでした。「方位角制御」とは、狙った方角に発射する方向を制御することです。これまで、東西南北どの方角に飛行するか、風任せだったのです。
地上から発射する通常のロケットの場合、ランチャの方位角制御は容易です。一方で空中に浮遊している気球の場合、ランチャを固定する土台が無いため、狙った方向に向けるのが難しく、目標軌道に衛星を送ることができません。そこで人工衛星の姿勢制御にも用いられているCMGという仕組みを応用し、方位角制御機能を持たせたランチャを製作しました。これをクレーンに吊るして発射し、実証したのが前回です。
今回はこのランチャを浮遊している気球に吊り下げて、同様の実験を行いました。方位角制御を適用した気球からのロケット発射としてはこれが世界初となります。実験の目的は、気球の上下方向の運動や振り子運動が、ロケットの発射姿勢、飛行軌道に与える影響を明らかにすることです。
実験当日の様子
採石場で気球の準備
朝7時過ぎに全員集合。場所は前回と同じ宇部共立産業の採石場です。当日のスケジュールを確認後、各自の持ち場に行き、ランチャーやロケットの準備を開始しました。

宇部共立産業の採石場。奥行き400m、底は海抜0m以下!
予定より時間がかかりましたが、準備完了。岩谷技研さんに気球を浮かべて頂きました。ヘリウム気球を膨らます過程は初めて見ましたが、流されたり漏れたりしないようなノウハウの塊です。徐々に気球が膨らんでいき、数名が押さえていないと飛んでいく状態にまで膨らみました。
ランチャの吊り下げ
次に、ランチャを気球に吊り下げました。前回クレーンの下に吊り下げていたものと同じですが、本物の気球に吊り下げたのは初めてです。

ここで姿勢制御装置の電源を入れ、動作確認テストを行いました。しかし、トラブル発生です。操縦者のM君がリモコンで操作してもほとんど動かないのです。下図のとおり、姿勢制御装置は、左右に一つずつの回転円盤とそれを駆動するモータ、その回転軸を傾けるためのサーボをそれぞれ搭載しています。プロポはラジコンヘリコプター用のもので、スロットルで円盤の回転速度ωを上げ、2本のスティックで回転円盤の傾け角θを、左右逆方向もしくは同方向に制御することができます。
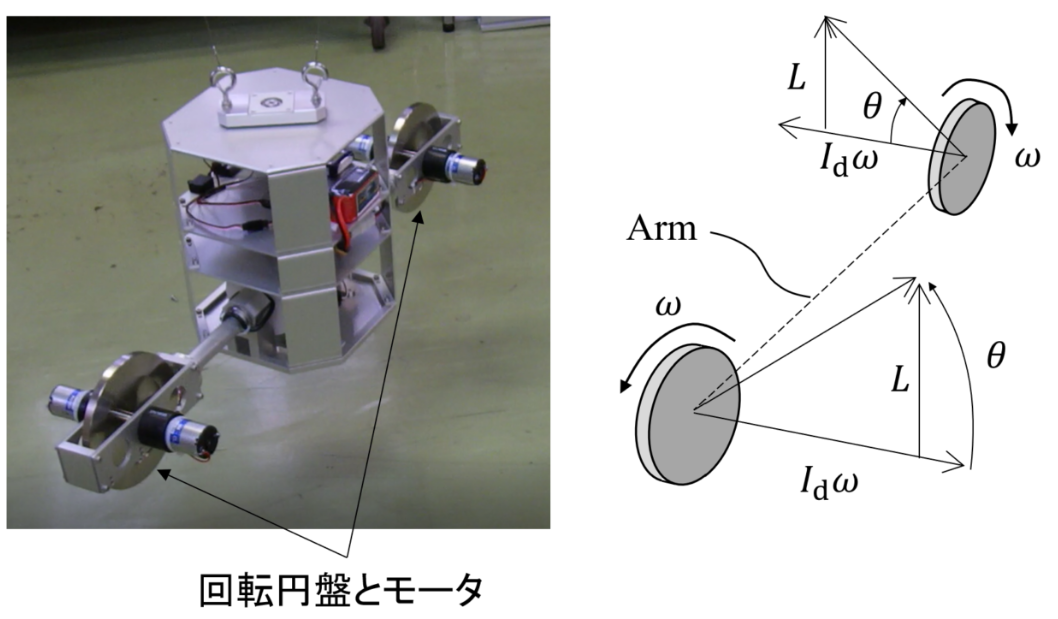
方位角制御装置(CMG)。右図は 傾け角を左右同方向に角度θ付ける様子。
私もプロポを借りて直接操縦してみましたが、円盤の回転速度と傾斜角はプロポの操作通り動いているように見えますが、ランチャを方位角方向に回転させるトルクが発生しません。猫が空中で姿勢を変えるのと同じ要領で、回転を止めて傾斜角を戻し、再び回転数を上げて回転角を付けて、という方法も試しましたが、どうにもトルクが不足している感じでした。
周囲も不安がる中、私が悩んでいると、操縦者のM君は別の操縦方法を編み出しました。左右の回転軸を同方向に傾けてあげると、方位角トルクが発生するというのです。おかしい、その方法では左右の角運動量変化が相殺して、理論的にはむしろ動かないはず。しかし私も試してみると確かに操縦できます。この時は理由か分かりませんでしたが(後述)、少なくとも問題なく操縦できることが分かったので実験続行。
非係留浮上テスト
次に、発射時と同様に非係留状態を作り出すテストを実施しました。地面からワイヤで係留された状態の気球は、3次元的な動きが規制されているため、実際の空中発射時のように自由に浮遊する状態とは異なった運動になってしまいます。そこで発射タイミングを工夫して、ロケットの点火直前に係留ワイヤを放し、自由な気球が上昇していく間に点火するようにしました。20mほど上昇すると、再びワイヤに拘束され上昇が止まります。その間10秒ほどの間に発射する必要があります。
イグナイタを付けずにロケットをランチャに装填し、発射時を模擬した状態で放球テストを実施しました。ランチャの方位角制御が問題なく可能であること、放球中に大きなランチャ姿勢角の変化が無いことが確認できました。
イグナイタの動作確認もここで行いました。ランチャが空中にあるので、点火信号を地上から無線で送信する必要があります。無線点火装置はこの採石場を管理する宇部共立産業の社長自ら引き受けて頂きました。石材屋さんでありながら、電子機器まで自作してしまうとは、、、
もう一度気球を地上まで手繰り寄せ、加速度センサを装着し、イグナイタと無線点火装置を接続しました。これで準備完了ですので、総員退避です。学生のM君が遠隔操縦で安全な方位角へランチャを向けたところで、カウントダウン開始。3、2、1、、、
発射!
放球された気球が上昇する中、AstroXの小田さんの合図と同時に発射ボタンが押され、、、、てもロケットはそのまま。気球は上昇を続け、あれ?と思ったその時、シュゴーッとロケットが空高く上がっていきました。成功です。ランチャを向けていた方位角に向かって飛んで行きましたので、自由飛行中の気球から方位角を制御した状態の空中発射に世界で初めて成功した瞬間です。

その後2回、全部で3回の発射を行いましたが、いずれも狙った方向に飛行しました。最初の1回だけ点火に時間差があった理由は不明ですが、2回目以降は問題ありませんでした。
原因判明
ランチャの姿勢制御試験で、左右の回転軸の傾斜方法を通常と逆にしなければならなかった理由は、3回目の発射前にランチャを調整しているときに判明しました。円盤の回転方向が左右で同じ向きになっていたのです。これでは角運動量ベクトルが左右で同じ向きになるため、反動トルクを得るためには同じ向きに回転軸を傾けねばならないわけです。
まとめ
実験は全て成功し、ランチャの詳細な挙動も取得できました。現在データを分析中で、まとめて論文で報告する予定です。
(庄山 直芳)